
PX სერიის მინიატურული დენის გადაცემის ძრავა
მიმოხილვა
J-SZ(ZYT)-PX სერიის მინიატურული DC გადაცემათა ძრავები, შესაბამისად, შედგება SZ(ZYT) სერიის DC ძრავებისგან და PX ტიპის ჩვეულებრივი ზუსტი პლანეტარული რედუქტორებისგან და აღჭურვილია ელექტრომომარაგებით, რომელსაც შეუძლია განახორციელოს სიჩქარის უწყვეტი რეგულირება.რეგულირების ფართო დიაპაზონი, მცირე ზომა, მსუბუქი წონა, მაღალი ეფექტურობა, კომპაქტური სტრუქტურა, დიდი გამომავალი ბრუნვის მომენტი, ფართოდ გამოიყენება დისკებში, რომლებიც საჭიროებენ დაბალ სიჩქარეს, მაღალ ბრუნვას და სიჩქარის უსაფეხურო რეგულირებას.უსასრულოდ ცვალებადი სიჩქარე.
PX სერიის პლანეტარული გადაცემათა კოლოფი შეიძლება პირდაპირ დაუკავშირდეს AC ძრავებს, სტეპერ ძრავებს და სხვა ძრავებს.
PX სერიები ასევე შეიძლება პირდაპირ დაუკავშირდეს ჭიის გადაცემათა კოეფიციენტს და ციკლოიდური ბორბლის რედუქტორს, რათა შეიქმნას რედუქტორები სხვადასხვა სიჩქარის კოეფიციენტებით ან დიდი სიჩქარის კოეფიციენტებით.
რედუქტორის მოდელის ინსტრუქცია
ძრავის მოდელი
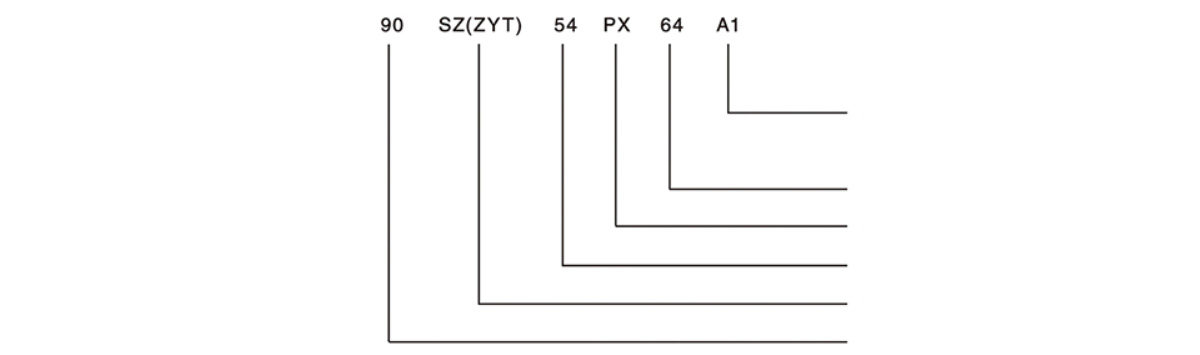
A1- სამონტაჟო ფორმა: A1 არის ფეხის მონტაჟი, A3 არის ფლანგების მონტაჟი, B5 არის მრგვალი ფლანგების მონტაჟი
64 -შემცირების თანაფარდობა: 1:64
PX - ჩვეულებრივი ზუსტი პლანეტარული რედუქტორი
54 - ძრავის მუშაობის პარამეტრის კოდი
SZ(ZYT) - DC სერვო ძრავა (მუდმივი მაგნიტი DC ძრავა)
90 - ძრავის ბაზის ნომერი: მიუთითებს გარე დიამეტრზე 90 მმ
შემცირების მოდელი
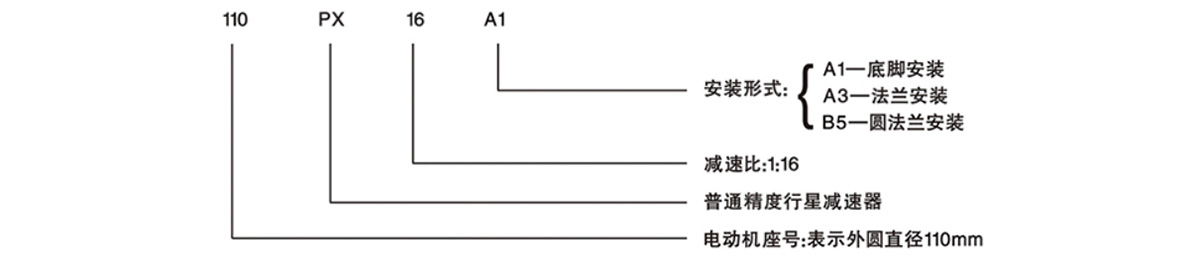
A1- სამონტაჟო ფორმა: A1 არის ფეხის მონტაჟი, A3 არის ფლანგების მონტაჟი, B5 არის მრგვალი ფლანგების მონტაჟი
16 - შემცირების თანაფარდობა: 1:64
PX - ჩვეულებრივი ზუსტი პლანეტარული რედუქტორი
110 - ძრავის ბაზის ნომერი: მიუთითებს გარე დიამეტრზე 90 მმ
ელექტროძრავის ტექნიკური მონაცემები
| სიჩქარე (რ/წთ) | ბრუნვის მომენტი (mN.m) | მოდელი | Ძალა | რეიტინგული სიჩქარე (რ/წთ) | Დაინსტალირება | რეიტინგული ძაბვა | შემცირების თანაფარდობა | შენიშვნები | |
| 750 | 260 | 55 ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187.5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660 წ | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187.5 | 1270 წ | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187.5 | 1780 წ | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
PS სერიის ზოგადი სიჩქარის თანაფარდობა
დონე 1: 4, 6
საშუალო: 16, 24, 36
დონე 3: 64 , 96 , 144 , 216
დონე 4: 256\384\576\864\1296
90PX სერიის არასტანდარტული სიჩქარის თანაფარდობა
დონე 1: 3
დონე 2: 9, 12, 18
დონე 3: 27 , 48 , 54 , 72 , 108
დონე 4: 81 , 162 , 192 , 288 , 324 , 432 , 648
110PX სერიის არასტანდარტული სიჩქარის თანაფარდობა
დონე 1: 5
დონე 2: 20, 25, 30
დონე 3: 80 , 100 , 120 , 125 , 150 , 180
დონე 4: 320 , 400 , 480 , 500 , 600 , 625 , 720 , 750 , 900 , 1080
შეიძლება შეიქმნას არასტანდარტული რედუქტორები, როგორიცაა სპეციალური სიჩქარის კოეფიციენტი, სიჩქარე, ინსტალაციის ზომა და ა.შ
შერჩევის მაგალითი
მომხმარებელს შეუძლია სწორად შეარჩიოს რედუქტორის სიმძლავრე და მოდელი რეალური სამუშაო სისტემისა და დატვირთვის ხასიათის მიხედვით, შემდეგი შინაარსის მითითებით.
1.დატვირთვის ბრუნვის და რედუქტორის გამომავალი სიჩქარის მიხედვით საჭირო სიმძლავრე შეიძლება გამოითვალოს შემდეგი ფორმულით: P=T n/kh
ფორმულაში: P- გამომავალი სიმძლავრე WT - დატვირთვის ბრუნი Nm, აირჩიეთ n- გამომავალი სიჩქარე r/min ტექნიკური მონაცემების მიხედვით
K- დატვირთვის მუდმივი 9560 η - გადაცემის ეფექტურობა, შერჩეული შემდეგი ცხრილიდან
გადაცემის კოეფიციენტი
| გადაცემის კოეფიციენტი (i) | 4 (6) | 16(36) | 64(216) | 256(1296) |
| η | 0.76 | 0.72 | 0.68 | 0.65 |
2.ძრავის გუბერნატორი შეიძლება შეირჩეს იმისათვის, რომ გააცნობიეროს რედუქტორის სიჩქარის უცვლელი ცვლილება O-დან ნომინალურ სიჩქარემდე.
3. ფაქტობრივი სამუშაო სისტემისა და დატვირთვის ხასიათის მიხედვით, მომსახურების კოეფიციენტი შეიძლება შეირჩეს მომსახურების კოეფიციენტების ცხრილის მიხედვით.გაანგარიშების შემდეგ შეიძლება განისაზღვროს რედუქტორის საჭირო სიმძლავრე და საჭირო გამომავალი სიჩქარის მიხედვით რედუქტორის მოდელის შერჩევა ტექნიკური მონაცემების ცხრილის მითითებით.
სამუშაო ინდექსის ფურცელი
| ყოველდღიური სამუშაო დრო | დატვირთვის დონე | |||
| საშუალო სტაბილური | საშუალო ცოცხალი | მძიმე გავლენა | ||
| 12 | 1 | 1.25 | 1.75 | |
| 24 | 1.25 | 1.50 | 2 | |
მაგალითად: თუ დატვირთვა თანაბარი და სტაბილურია, ძრავის საჭირო ნომინალური სიმძლავრეა 40 ვტ, ნომინალური ძაბვა არის 110 ვ, გამომავალი სიჩქარის კოეფიციენტი არის 4 და სამუშაო დრო დღეში 12 სთ, მაშინ არჩეულია 40 ვტ.თუ დატვირთვის ბუნება ზომიერი ვიბრაციაა:
შემდეგ: ა.იხილეთ მომსახურების კოეფიციენტის ცხრილი, რათა აირჩიოთ მომსახურების სერია 1.25-ად.საჭირო სიმძლავრე W=40W*1.25=50W
ბ.შეამოწმეთ ტექნიკური მონაცემების ფურცელი არასავალდებულო J70SZ54P*4-ისთვის
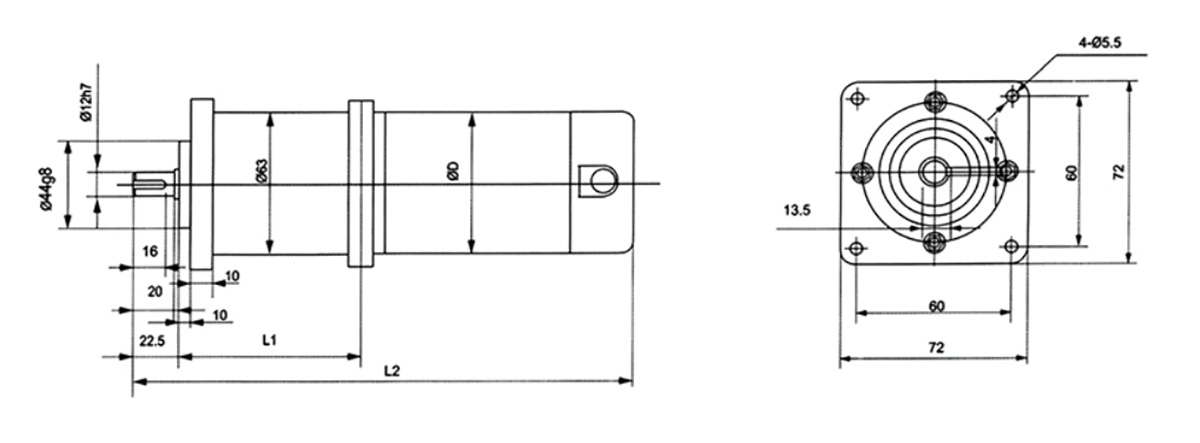
70PX წინა ფლანგა
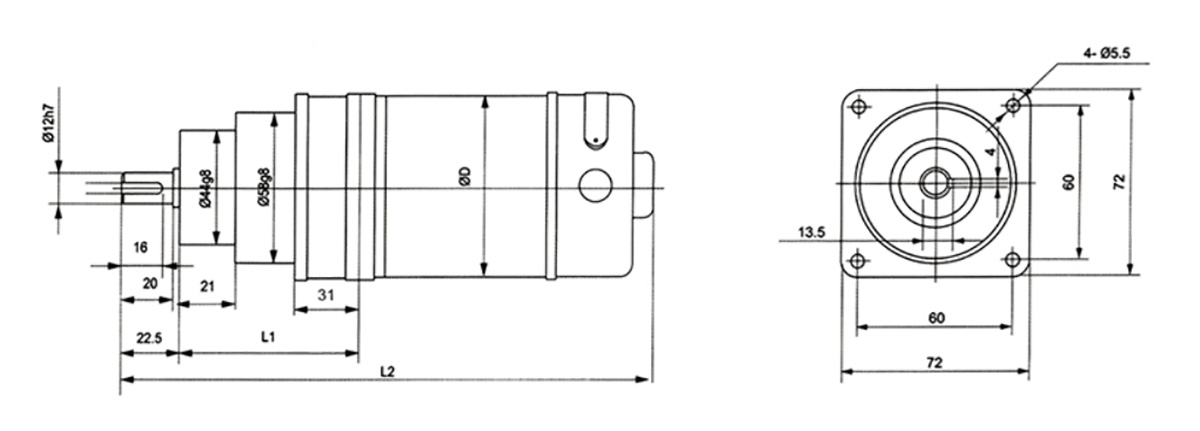
70PX უკანა ფლანგა
პროდუქტების კატეგორიები
-

DC შემცირების ძრავა 15W30W60W90W120W200W300W slo...
-

12V24V მუდმივი მაგნიტი DC შენელების ძრავა 1...
-

250W-600W 12-48V მთავარი ჯაგრისის ძრავა სვიპერისთვის...
-

96V7.5KW ჯაგრისების გარეშე DC მუდმივი მაგნიტის ძრავა...
-

პლანეტარული DC შენელების ძრავა 42XA775 დიდი ტ...
-

Xinda rv40 DC შემცირების ტურბინის ძრავა 12 / 24v2...





