ელექტრო მანქანები ძირითადად შედგება სამი ნაწილისგან: ძრავის მართვის სისტემა, ბატარეის სისტემა და მანქანის მართვის სისტემა.ძრავის წამყვანი სისტემა არის ნაწილი, რომელიც პირდაპირ გარდაქმნის ელექტრო ენერგიას მექანიკურ ენერგიად, რომელიც განსაზღვრავს ელექტრო მანქანების მუშაობის მაჩვენებლებს.ამიტომ, წამყვანი ძრავის შერჩევა განსაკუთრებით მნიშვნელოვანია.
გარემოს დაცვის გარემოში, ელექტრო მანქანები ასევე იქცა კვლევის ცხელ წერტილად ბოლო წლებში.ელექტრო სატრანსპორტო საშუალებებს შეუძლიათ მიაღწიონ ნულოვან ან ძალიან დაბალ ემისიებს ურბანულ მოძრაობაში და აქვთ უზარმაზარი უპირატესობები გარემოს დაცვის სფეროში.ყველა ქვეყანა ბევრს მუშაობს ელექტრო მანქანების განვითარებაზე.ელექტრო მანქანები ძირითადად შედგება სამი ნაწილისგან: ძრავის მართვის სისტემა, ბატარეის სისტემა და მანქანის მართვის სისტემა.ძრავის წამყვანი სისტემა არის ნაწილი, რომელიც პირდაპირ გარდაქმნის ელექტრო ენერგიას მექანიკურ ენერგიად, რომელიც განსაზღვრავს ელექტრო მანქანების მუშაობის მაჩვენებლებს.ამიტომ, წამყვანი ძრავის შერჩევა განსაკუთრებით მნიშვნელოვანია.
1. მოთხოვნები ელექტრული სატრანსპორტო საშუალებების მიმართ მამოძრავებელი ძრავებისთვის
ამჟამად, ელექტრომობილის მუშაობის შეფასება ძირითადად ითვალისწინებს შესრულების სამ ინდიკატორს:
(1) მაქსიმალური გარბენი (კმ): ელექტრომობილის მაქსიმალური გარბენი ბატარეის სრულად დამუხტვის შემდეგ;
(2) აჩქარების უნარი (s): მინიმალური დრო, რომელიც საჭიროა ელექტროსატრანსპორტო საშუალების აჩქარებისთვის გაჩერებიდან გარკვეულ სიჩქარემდე;
(3) მაქსიმალური სიჩქარე (კმ/სთ): მაქსიმალური სიჩქარე, რომელსაც შეუძლია მიაღწიოს ელექტრო მანქანას.
ელექტრო სატრანსპორტო საშუალებების მამოძრავებელი მახასიათებლებისთვის შექმნილ ძრავებს აქვთ სპეციალური მოთხოვნები სამრეწველო ძრავებთან შედარებით:
(1) ელექტრო სატრანსპორტო საშუალების მამოძრავებელი ძრავა, როგორც წესი, მოითხოვს მაღალი დინამიური შესრულების მოთხოვნებს ხშირი დაწყების/გაჩერების, აჩქარების/შენელების და ბრუნვის კონტროლისთვის;
(2) მთლიანი მანქანის წონის შემცირების მიზნით, ჩვეულებრივ უქმდება მრავალსიჩქარიანი გადაცემათა კოლოფი, რაც მოითხოვს, რომ ძრავას შეეძლოს უფრო მაღალი ბრუნვის უზრუნველყოფა დაბალი სიჩქარით ან ფერდობზე ასვლისას და ჩვეულებრივ გაუძლებს 4-5-ჯერ გადატვირთვა;
(3) სიჩქარის რეგულირების დიაპაზონი უნდა იყოს რაც შეიძლება დიდი და ამავდროულად, საჭიროა მაღალი ოპერაციული ეფექტურობის შენარჩუნება სიჩქარის რეგულირების მთელ დიაპაზონში;
(4) ძრავა შექმნილია იმისთვის, რომ ჰქონდეს მაქსიმალურად მაღალი რეიტინგული სიჩქარე და ამავდროულად, მაქსიმალურად გამოიყენება ალუმინის შენადნობის გარსაცმები.მაღალსიჩქარიანი ძრავა მცირე ზომისაა, რაც ხელს უწყობს ელექტრომობილების წონის შემცირებას;
(5) ელექტრომობილებს უნდა ჰქონდეთ ენერგიის ოპტიმალური გამოყენება და გააჩნდეთ დამუხრუჭების ენერგიის აღდგენის ფუნქცია.რეგენერაციული დამუხრუჭების შედეგად მიღებული ენერგია ზოგადად უნდა აღწევდეს მთლიანი ენერგიის 10%-20%-ს;
(6) ელექტრო სატრანსპორტო საშუალებებში გამოყენებული ძრავის სამუშაო გარემო უფრო რთული და მკაცრია, რაც მოითხოვს ძრავას ჰქონდეს კარგი საიმედოობა და გარემოსდაცვითი ადაპტაცია, და ამავე დროს უზრუნველყოს, რომ ძრავის წარმოების ღირებულება არ იყოს ძალიან მაღალი.
2. რამდენიმე ხშირად გამოყენებული წამყვანი ძრავა
2.1 DC ძრავა
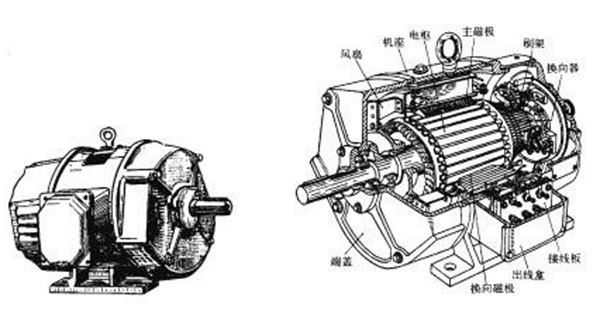
ელექტრო სატრანსპორტო საშუალებების განვითარების ადრეულ ეტაპზე, ელექტრო მანქანების უმეტესობა იყენებდა DC ძრავებს, როგორც მამოძრავებელ ძრავებს.ამ ტიპის საავტომობილო ტექნოლოგია შედარებით მომწიფებულია, მარტივი კონტროლის მეთოდებით და სიჩქარის შესანიშნავი რეგულირებით.ის იყო ყველაზე ფართოდ გამოყენებული სიჩქარის რეგულირების ძრავების სფეროში..თუმცა, DC ძრავის რთული მექანიკური სტრუქტურის გამო, როგორიცაა: ჯაგრისები და მექანიკური კომუტატორები, მისი მყისიერი გადატვირთვის სიმძლავრე და ძრავის სიჩქარის შემდგომი ზრდა შეზღუდულია, ხოლო ხანგრძლივი მუშაობის შემთხვევაში, მექანიკური სტრუქტურა. ძრავა იქნება ზარალი გენერირებული და ტექნიკური ხარჯები იზრდება.გარდა ამისა, როდესაც ძრავა მუშაობს, ჯაგრისების ნაპერწკლები აიძულებს როტორს გაცხელდეს, ხარჯავს ენერგიას, ართულებს სითბოს გაფრქვევას და ასევე იწვევს მაღალი სიხშირის ელექტრომაგნიტურ ჩარევას, რაც გავლენას ახდენს მანქანის მუშაობაზე.DC ძრავების ზემოაღნიშნული ნაკლოვანებების გამო, მიმდინარე ელექტრომობილებმა ძირითადად გააუქმეს DC ძრავები.
2.2 AC ასინქრონული ძრავა
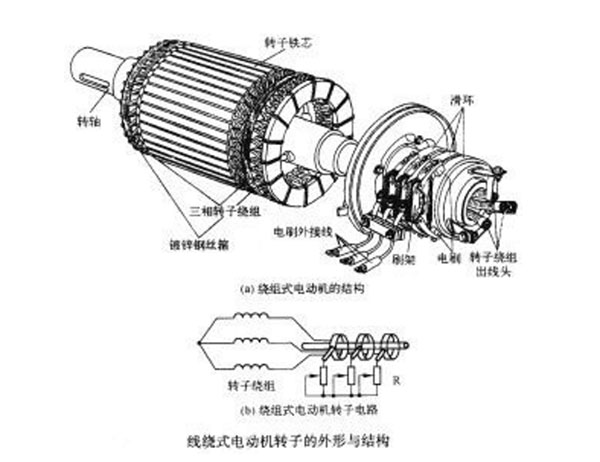
AC ასინქრონული ძრავა არის ძრავის ტიპი, რომელიც ფართოდ გამოიყენება ინდუსტრიაში.იგი ხასიათდება იმით, რომ სტატორი და როტორი ლამინირებულია სილიკონის ფოლადის ფურცლებით.ორივე ბოლო შეფუთულია ალუმინის საფარით., საიმედო და გამძლე ოპერაცია, მარტივი მოვლა.იმავე სიმძლავრის DC ძრავასთან შედარებით, AC ასინქრონული ძრავა უფრო ეფექტურია და მასა დაახლოებით ნახევარი მსუბუქია.თუ ვექტორული კონტროლის კონტროლის მეთოდი მიიღება, შეიძლება მივიღოთ კონტროლირებადი და უფრო ფართო სიჩქარის რეგულირების დიაპაზონი, რომელიც შედარებულია DC ძრავის დიაპაზონთან.მაღალი ეფექტურობის, მაღალი სპეციფიკური სიმძლავრის და მაღალსიჩქარიანი მუშაობისთვის ვარგისიანობის უპირატესობების გამო, AC ასინქრონული ძრავები ყველაზე ფართოდ გამოყენებული ძრავებია მაღალი სიმძლავრის ელექტრო მანქანებში.ამჟამად, AC ასინქრონული ძრავები წარმოებულია ფართომასშტაბიანი და არსებობს სხვადასხვა ტიპის სექსუალურ პროდუქტებს შორის არჩევანი.თუმცა, მაღალსიჩქარიანი მუშაობის შემთხვევაში, ძრავის როტორი სერიოზულად თბება და მუშაობის დროს ძრავა უნდა გაცივდეს.ამავდროულად, ასინქრონული ძრავის წამყვანი და კონტროლის სისტემა ძალიან რთულია, ასევე მაღალია ძრავის კორპუსის ღირებულება.მუდმივი მაგნიტის ძრავასთან და გადართვასთან შედარებით ძრავებისთვის, ასინქრონული ძრავების ეფექტურობა და სიმძლავრის სიმკვრივე დაბალია, რაც არ უწყობს ხელს ელექტრო მანქანების მაქსიმალური გარბენის გაუმჯობესებას.
2.3 მუდმივი მაგნიტის ძრავა
მუდმივი მაგნიტის ძრავები შეიძლება დაიყოს ორ ტიპად სტატორის გრაგნილების სხვადასხვა დენის ტალღის ფორმის მიხედვით, ერთი არის უფურჩო DC ძრავა, რომელსაც აქვს მართკუთხა პულსური ტალღის დენი;მეორე არის მუდმივი მაგნიტის სინქრონული ძრავა, რომელსაც აქვს სინუსური ტალღის დენი.ორი ტიპის ძრავა ძირითადად ერთნაირია სტრუქტურით და მუშაობის პრინციპით.როტორები მუდმივი მაგნიტებია, რაც ამცირებს აგზნების შედეგად გამოწვეულ დანაკარგს.სტატორი დამონტაჟებულია გრაგნილებით, რათა გამოიმუშაოს ბრუნვა ალტერნატიული დენის მეშვეობით, ამიტომ გაგრილება შედარებით მარტივია.იმის გამო, რომ ამ ტიპის ძრავას არ სჭირდება ჯაგრისების და მექანიკური კომუტაციის სტრუქტურის დაყენება, ექსპლუატაციის დროს არ წარმოიქმნება კომუტაციის ნაპერწკლები, ოპერაცია უსაფრთხო და საიმედოა, მოვლა მოსახერხებელია და ენერგიის გამოყენების მაღალი მაჩვენებელი.
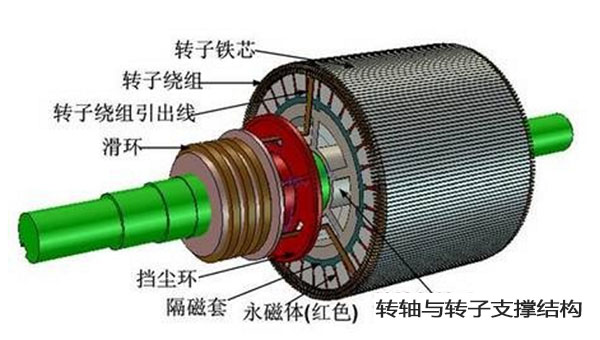
მუდმივი მაგნიტის ძრავის კონტროლის სისტემა უფრო მარტივია, ვიდრე AC ასინქრონული ძრავის კონტროლის სისტემა.თუმცა, მუდმივი მაგნიტის მასალის პროცესის შეზღუდვის გამო, მუდმივი მაგნიტის ძრავის სიმძლავრის დიაპაზონი მცირეა და მაქსიმალური სიმძლავრე ზოგადად მხოლოდ ათობით მილიონია, რაც მუდმივი მაგნიტის ძრავის ყველაზე დიდი მინუსია.ამავდროულად, როტორზე მუდმივი მაგნიტის მასალას ექნება მაგნიტური დაშლის ფენომენი მაღალი ტემპერატურის, ვიბრაციის და ჭარბი დენის პირობებში, ამიტომ შედარებით რთულ სამუშაო პირობებში მუდმივი მაგნიტის ძრავა მიდრეკილია დაზიანებისკენ.უფრო მეტიც, მუდმივი მაგნიტის მასალების ფასი მაღალია, ამიტომ მთელი ძრავის და მისი კონტროლის სისტემის ღირებულება მაღალია.
2.4 გადართული უკმარისობის ძრავა
როგორც ახალი ტიპის ძრავას, გადართვის ძრავას აქვს უმარტივესი სტრუქტურა სხვა ტიპის ძრავებთან შედარებით.სტატორი და როტორი ორივე ორმაგი გამორჩეული კონსტრუქციაა, რომელიც დამზადებულია ჩვეულებრივი სილიკონის ფოლადის ფურცლებისგან.როტორზე სტრუქტურა არ არის.სტატორი აღჭურვილია მარტივი კონცენტრირებული გრაგნილით, რომელსაც აქვს მრავალი უპირატესობა, როგორიცაა მარტივი და მყარი სტრუქტურა, მაღალი საიმედოობა, მსუბუქი წონა, დაბალი ღირებულება, მაღალი ეფექტურობა, დაბალი ტემპერატურის ზრდა და მარტივი მოვლა.უფრო მეტიც, მას აქვს DC სიჩქარის კონტროლის სისტემის კარგი კონტროლირებადი მახასიათებლები და შესაფერისია მკაცრი გარემოსთვის და ძალიან შესაფერისია ელექტრო მანქანების მამოძრავებელ ძრავად გამოსაყენებლად.

იმის გათვალისწინებით, რომ როგორც ელექტრული სატრანსპორტო საშუალების მამოძრავებელი ძრავები, DC ძრავები და მუდმივი მაგნიტის ძრავები აქვთ ცუდი ადაპტირება სტრუქტურასა და რთულ სამუშაო გარემოში და მიდრეკილნი არიან მექანიკური და დემაგნიტიზაციის ჩავარდნებისკენ, ეს ნაშრომი ყურადღებას ამახვილებს გადართვის ძაბვის ძრავების და AC ასინქრონული ძრავების დანერგვაზე.მანქანასთან შედარებით, მას აქვს აშკარა უპირატესობები შემდეგ ასპექტებში.
2.4.1 ძრავის კორპუსის სტრუქტურა
გადართველი უხერხულობის ძრავის სტრუქტურა უფრო მარტივია, ვიდრე ციყვი-გალიის ინდუქციური ძრავის სტრუქტურა.მისი გამორჩეული უპირატესობა ის არის, რომ როტორზე არ არის გრაგნილი და ის მხოლოდ ჩვეულებრივი სილიკონის ფოლადის ფურცლებით არის დამზადებული.მთელი ძრავის დანაკარგის უმეტესი ნაწილი კონცენტრირებულია სტატორის გრაგნილზე, რაც ძრავს მარტივს ხდის წარმოებას, აქვს კარგი იზოლაცია, ადვილად გაცივდება და აქვს სითბოს გაფრქვევის შესანიშნავი მახასიათებლები.ამ ძრავის სტრუქტურას შეუძლია შეამციროს ძრავის ზომა და წონა და შეიძლება მიღებულ იქნეს მცირე მოცულობით.უფრო დიდი გამომავალი სიმძლავრე.საავტომობილო როტორის კარგი მექანიკური ელასტიურობის გამო, გადართული უხერხულობის ძრავები შეიძლება გამოყენებულ იქნას ულტრა მაღალი სიჩქარით მუშაობისთვის.
2.4.2 ძრავის წამყვანი წრე
გადართვის ძრავის ამოძრავების სისტემის ფაზური დენი ცალმხრივია და არაფერ შუაშია ბრუნვის მიმართულებასთან და მხოლოდ ერთი ძირითადი გადართვის მოწყობილობა შეიძლება გამოყენებულ იქნას ძრავის ოთხი კვადრანტული მუშაობის მდგომარეობის დასაკმაყოფილებლად.დენის გადამყვანის წრე პირდაპირ სერიულად არის დაკავშირებული ძრავის აგზნების გრაგნილთან და თითოეული ფაზის წრე დამოუკიდებლად აწვდის ენერგიას.მაშინაც კი, თუ გარკვეული ფაზის გრაგნილი ან ძრავის კონტროლერი ვერ ხერხდება, მას მხოლოდ სჭირდება ფაზის მუშაობის შეჩერება უფრო დიდი ზემოქმედების გარეშე.ამიტომ, როგორც ძრავის კორპუსი, ასევე დენის გადამყვანი ძალიან უსაფრთხო და საიმედოა, ამიტომ ისინი უფრო შესაფერისია მკაცრი გარემოში გამოსაყენებლად, ვიდრე ასინქრონული მანქანები.
2.4.3 საავტომობილო სისტემის მუშაობის ასპექტები
გადართვის უხერხულობის ძრავებს აქვთ მრავალი საკონტროლო პარამეტრი და ადვილია დააკმაყოფილოს ელექტრო მანქანების ოთხი კვადრანტული მუშაობის მოთხოვნები შესაბამისი კონტროლის სტრატეგიებისა და სისტემის დიზაინის მეშვეობით და შეუძლია შეინარჩუნოს შესანიშნავი დამუხრუჭების უნარი მაღალსიჩქარიანი მუშაობის ადგილებში.გადართვის ძაბვის ძრავებს არა მხოლოდ აქვთ მაღალი ეფექტურობა, არამედ ინარჩუნებენ მაღალ ეფექტურობას სიჩქარის რეგულირების ფართო დიაპაზონში, რაც შეუდარებელია სხვა ტიპის ძრავის ამძრავ სისტემებთან.ეს შესრულება ძალიან შესაფერისია ელექტრო მანქანების მუშაობისთვის და ძალიან სასარგებლოა ელექტრო მანქანების საკრუიზო დიაპაზონის გასაუმჯობესებლად.
3. დასკვნა
ამ ნაშრომის ფოკუსირებაა გადართული უხერხულობის ძრავის, როგორც ელექტრო სატრანსპორტო საშუალებების მამოძრავებელი ძრავის უპირატესობების წარმოჩენა, ამძრავის ძრავის სიჩქარის კონტროლის სხვადასხვა საყოველთაოდ გამოყენებული სისტემების შედარების გზით, რაც წარმოადგენს კვლევის ცხელ წერტილს ელექტრო მანქანების განვითარებაში.ამ ტიპის სპეციალური ძრავისთვის ჯერ კიდევ ბევრი ადგილია განვითარებისთვის პრაქტიკულ პროგრამებში.მკვლევარებმა მეტი ძალისხმევა უნდა გაატარონ თეორიული კვლევის ჩასატარებლად და ამავდროულად, აუცილებელია ბაზრის საჭიროებების გაერთიანება, რათა ხელი შეუწყოს ამ ტიპის ძრავის პრაქტიკაში გამოყენებას.
გამოქვეყნების დრო: მარ-24-2022